Tic Tac Toe (version 1)
This is my first attempt to create a tic tac toe robot. A human user can play against the EV3 robot. The robot draws the lines and crosses, the human player has to put cirkels to the playfield. The design of the robot is based on the work of Mike Koulouras, with some minor adjustments. For the algorithm – to calculate the next move – I wanted to use the minimax algorithm. But in the end I used a more simple algorithm. I will implement minimax in the future (see version 2).
More information about the minimax algorithm can be found here.
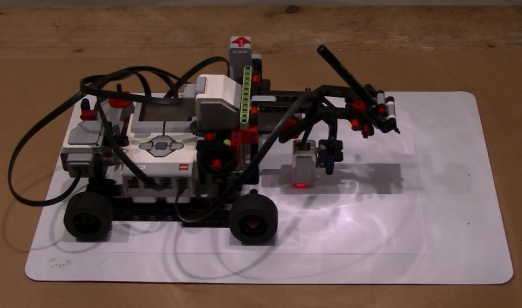
The human player has to draw filled circles in the field. Reason for this is that otherwise the robot makes to many mistakes in seeing the difference between the moves of the human player or himself. Moves are scanned by the LEGO colorsensor in Ambient Light Intensity Mode. The difference in value between crosses and open circles is to small to let the robot determine the right moves. Lighting conditions also have influence on the sensor reading. This is still something to improve. When you watch the video of Mike Koulouras you see that it can be done…
The program is written in RobotC, download code here.